




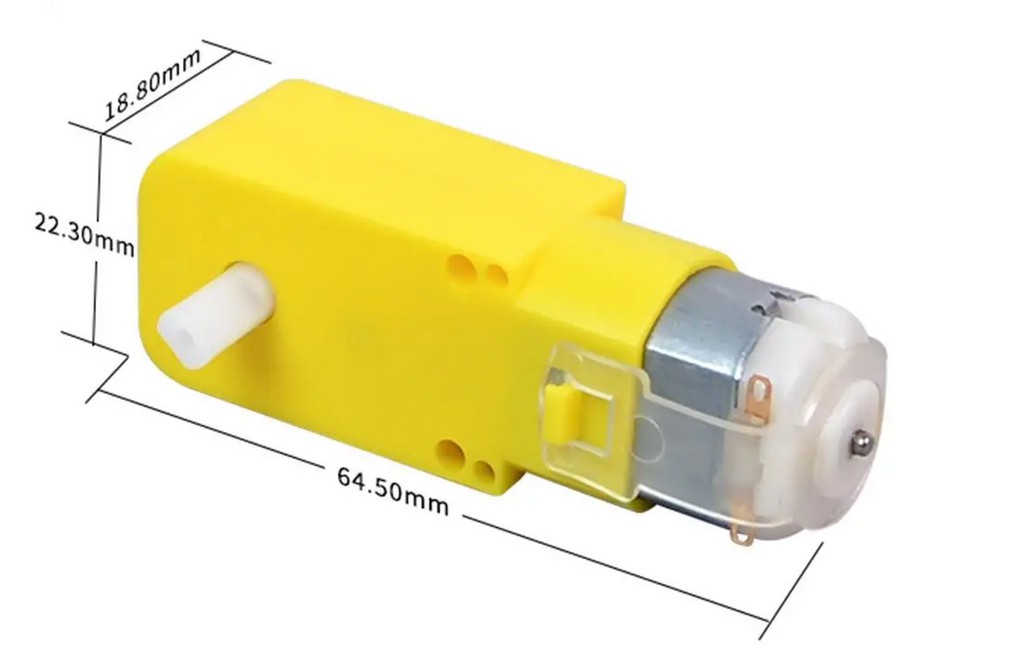
موتور گیربکس پلاستیکی دو طرفه G1:120 100RPM
1,120,000
ریال
این موتور گیربکس دارای چرخدنده های پلاستیکی است ولی صدای تولیدی کمی دارد. این محصول مناسب برای رباتهایی است که سایز کوچک دارند و گشتاور کمی نیاز دارند. درصورتیکه بیش از حد گشتاور به خروجی های آن وارد شود ممکن است چرخدنده ها آسیب ببینند . ولتاژ کاری آن بین 3 تا 6 ولت است و میتواند با توجه به قیمت و ابعاد کوچک آن برای کیت های آموزشی و پروژه های دانش آموزی استفاده شود.
مزیت دیگری هم که این نوع موتورهای دوطرفه دارند این است که میتوان از دوشفت(دوطرف) محور انتقال نیرو بهره برد و یا از شفت دوم برای اتصال به انکودر استفاده کرد!
سرعت چرخش این موتور نسبت به ولتاژ اعمالی به آن از 100 تا 250 دور در دقیقه میباشد.
Description:
Product: DC 3-6V Daul Shaft Motor
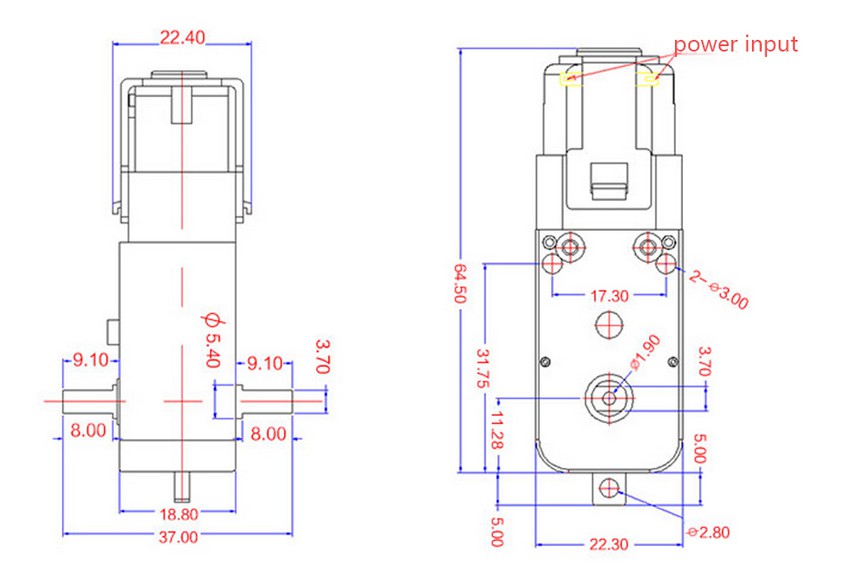
Operating Voltage: 3-6V
Operating Torque: 0.8kg/cm
Unload Speed:
1) 6V/ ≤220mA /245±10%rpm
2) 3V/≤150mA/125±10%rpm
Reduction Ratio: 1: 48
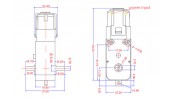
Size: 64.5*22.3*18.8mm
Application: RC Models









سلام لطفا چرخ مناسب این موتور که در حال حاضر در سایت موجود می باشد رو معرفی کنید
سلام می توانید از تمامی چرخ های کونیک خور موجود در این لینک از فروشگاه استفاده نمایید.
سلام، من میخوام یه ربات انباردار بلوتوثی درست کنم برای محرک کردن ربات چهار تا از این موتور گیربکس پلاستیکی نیاز دارم. ۱. تفاوت این موتور گیربکس با این 3202002053 موتور گیربکس صرفاً سرعته؟ ۲. برای دقت کار، پشنهاد شما استفاده از کدوم موتوره؟ چون ابعاد کلی ربات کوچیکه و باری هم که براش در نظر گرفته شده قوطی های رانی هست زمان و دقت تنظیم ربات؛ رو به روی بار خیلی مهمه. این نکته هم رو بگم که من از درایور موتور استفاده میکنم، و با تغییر ولتاژ می توان به خروجی کار مورد نظر رسید؟ و هر کدام از موتور هارو بگیرم فرقی نداره؟ لطفا راهنمایی کنید.
برای دریافت پاسخ سریع و جامع در مورد سوالات علمی و فنی خواهشمند است به انجمن های تخصصی برق و الکترونیک ECA مراجعه فرمایید. (www.eca.ir/forums)

