
فلوتر برقی UK-221 با کابل 1 متری
6,860,000
ریال
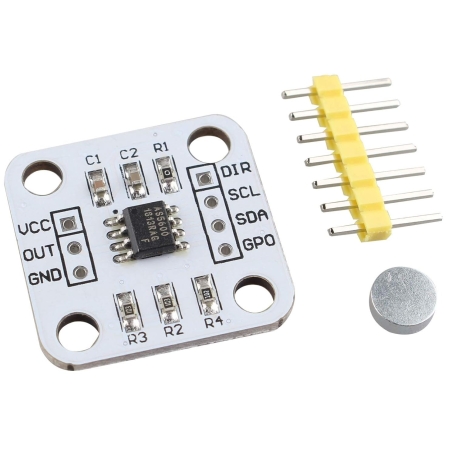








ماژول انکودر مغناطیسی AS5600 Magnetic Encoder
ماژول انکودر AS5600 یک سنسور مغناطیسی است که برای اندازهگیری دقیق زاویه چرخش استفاده میشود. این سنسور بهویژه برای اندازهگیری موقعیت محور یا شفتها در سیستمهایی مانند رباتیک، اتوماسیون صنعتی و دستگاههای اندازهگیری موقعیت مناسب است. در این سنسور، یک آهنربای مغناطیسی با میدان مغناطیسی قطبی در جهت قطر شفت باید به محور (شفت) متصل شود. همچنین سنسور باید در فاصله تقریباً 2 میلیمتر از این آهنربا قرار گیرد تا بتواند به درستی عمل کند.
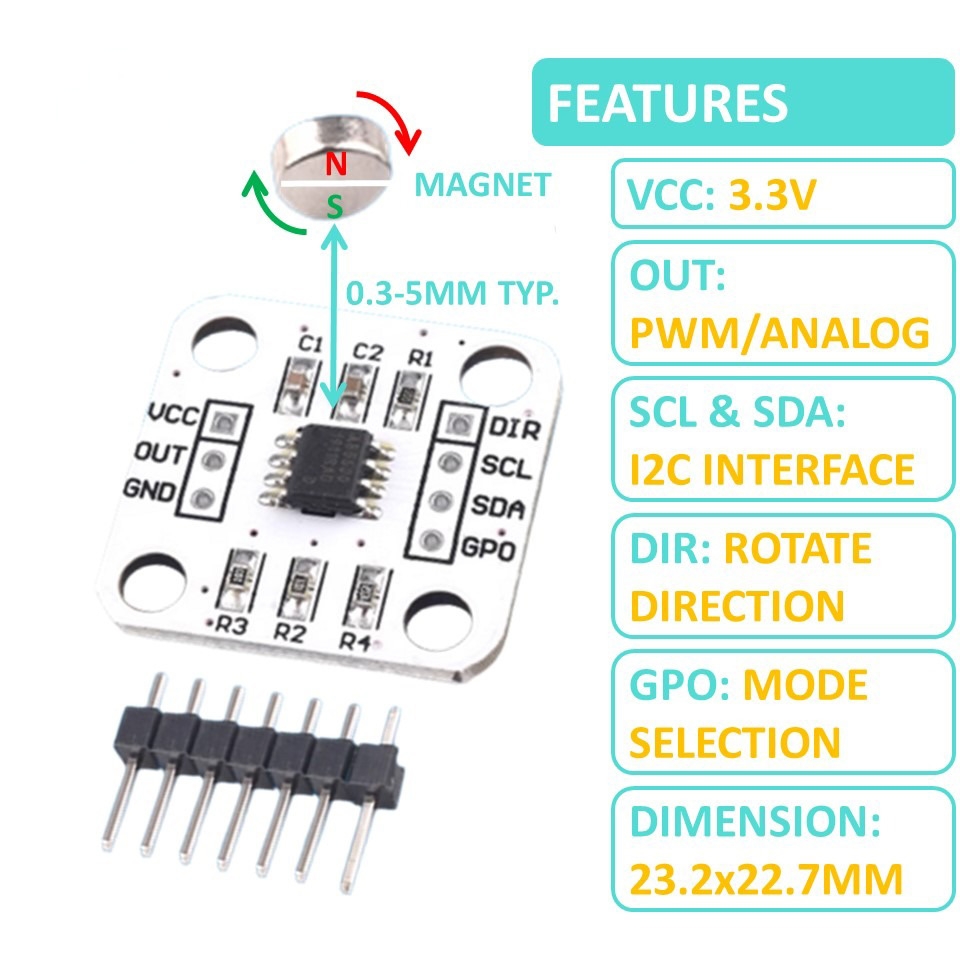
مشخصات
بر پایه تراشه AS5600
ولتاژ تغذیه 3.3 ولت (با برداشتن مقاومت R1، امکان استفاده از 5 ولت نیز وجود دارد)
امکان راه اندازی از طریق پروتکل I2C
ابعاد : 23*23 میلیمتر
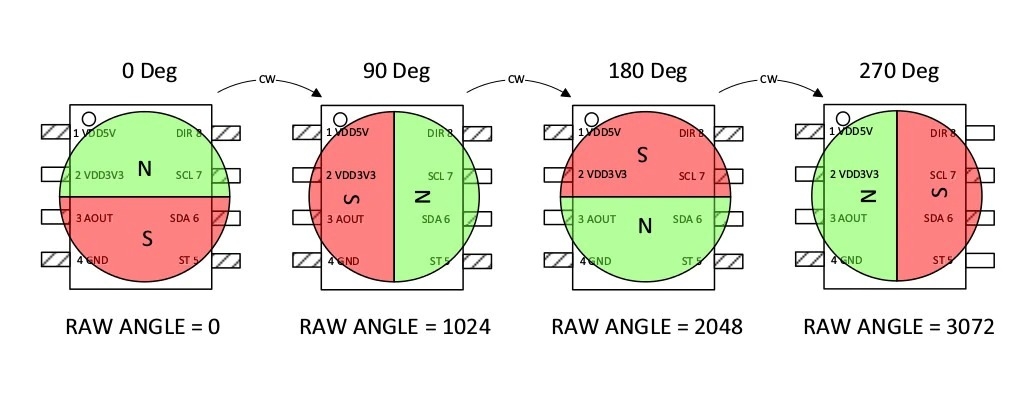
اندازهگیری زاویه بهوسیله القای مغناطیسی غیرتماسی
این ماژول بدون تماس فیزیکی با قطعات متحرک، زاویه چرخش را اندازهگیری میکند که این ویژگی باعث کاهش سایش و افزایش عمر مفید سیستم میشود
دقت بالا: ماژول AS5600 دارای دقت بالا برای اندازهگیری زاویههای چرخش است.
مدهای خروجی مختلف: این سنسور خروجیهایی از قبیل I2C (برای ارتباط دیجیتال)، PWM (برای سیگنال پالس پهنای متغیر)، و خروجی ولتاژ آنالوگ را ارائه میدهد
پینها
VCC (ولتاژ تغذیه): 3.3 ولت (اما با برداشتن مقاومت R1، امکان استفاده از 5 ولت نیز وجود دارد)
GND: پایه زمین (پاور گراند)
Out : خروجی PWM یا ولتاژ آنالوگ (برای اندازهگیری زاویه بهصورت دیجیتال یا آنالوگ)
DIR: جهت چرخش (اگر مقدار پایینتر باشد، زاویه در جهت عقربههای ساعت افزایش مییابد؛ در غیر این صورت، جهت چرخش معکوس خواهد بود)
SCL: خط ساعت ارتباط I2C
SDA: خط داده ارتباط I2C
GPO: انتخاب حالت (برای انتخاب حالت برنامهریزی، بهویژه در هنگام تنظیمات داخلی)
اقلامهمراه
ماژول AS5600
پین هدر 7 پین نری
آهنربای عدسی
The AS5600 encoder module is a magnetic sensor used to accurately measure the angle of rotation. This sensor is particularly suitable for measuring the position of an axis or shaft in systems such as robotics, industrial automation, and position measuring devices. In this sensor, a magnetic magnet with a magnetic field polarized in the direction of the shaft diameter must be attached to the axis (shaft). Also, the sensor must be placed at a distance of approximately 2 mm from this magnet in order to function properly.
Specifications
Based on AS5600 chip
Supply voltage 3.3V (by removing resistor R1, it is also possible to use 5V)
Possibility of starting up via I2C protocol
Dimensions: 23*23 mm
Angle measurement by non-contact magnetic induction
This module measures the angle of rotation without physical contact with moving parts, which reduces wear and increases the useful life of the system
High accuracy: The AS5600 module has high accuracy for measuring angles of rotation.
Various output modes: This sensor provides outputs such as I2C (for digital communication), PWM (for variable pulse width signal), and analog voltage output
Pins
VCC (supply voltage): 3.3V (but 5V can also be used by removing resistor R1)
GND: Ground (power ground)
Out: PWM or analog voltage output (for digital or analog angle measurement)
DIR: Rotation direction (if the value is lower, the angle increases clockwise; otherwise, the rotation direction will be reversed)
SCL: I2C communication clock line
SDA: I2C communication data line
GPO: Mode selection (for selecting the programming mode, especially during internal settings)











سلام اگه یه آهنربا قوی تر بذارم میشه برم دور تر مثلا توی 3 سانتی نصب کنم؟
سلام و احترام، خیر، استفاده از آهنربای قویتر باعث نمیشود بتوانید فاصله را تا حدود 3 سانتیمتر افزایش دهید. سنسور AS5600 برای کار در فاصله بسیار کم بین آهنربا و سنسور طراحی شده و در فاصله 3 سانتیمتری میدان مغناطیسی مناسب برای اندازهگیری دقیق تأمین نخواهد شد. برای عملکرد صحیح، فاصله باید در محدوده توصیهشده توسط سازنده باشد.
سلام آیا میشه برای خوندن جهت فرمون بازی با میکروکنترل درست کرد به درد این کار میخوره یا نه ؟
سلام
بله مناسب این کار است
من 100 تا از آهنربای این محصول نیاز داشتم آیا میتونید تهیه کنید و قیمت بدید؟
جهت استعلام قیمت و تعداد با پشتیبانی واحد فروش دفتر تبریز تماس بگیرید.


